Diverse M-Best Predictions from Probabilistic Models.
NSF IIS (RI) EAGER Grant No. 1353694PI: Dhruv Batra
Abstract
Perception problems are hard. Computer Vision systems must deal with significant levels of ambiguity - from inter- and intra-object occlusion and varying appearance, lighting, and pose. Probabilistic models provide a principled framework for dealing with uncertainty and for converting evidence into a posteriori belief about the world. Typically, a vision system uses this belief to predict the "most likely" or maximum a-posteriori hypothesis. Unfortunately, our current models are inaccurate and this single-best hypothesis is often incorrect.The overarching goal of this work is to allow vision systems to hedge against uncertainty by producing multiple plausible hypotheses. Specifically, this project develops techniques for finding a diverse set of high-probability solutions from probabilistic models. The project focuses on (a) interactive object cutout (where multiple segmentations are shown to the user to expedite convergence to an acceptable result); (b) semantic segmentation (where multiple plausible scene labelings are propagated to subsequent stages of a cascade for higher-order processing); (c) person/object tracking (where multiple localization hypotheses on each frame reduce the search space of a sequence tracker).
Publications (partially supported by NSF)
-
A Systematic Exploration of Diversity in Machine Translation.
Kevin Gimpel, Dhruv Batra, Greg Shakhnarovich, Chris Dyer.
Conference on Empirical Methods in Natural Language Processing (EMNLP) 2013.
Related Publications (prior to NSF support)
-
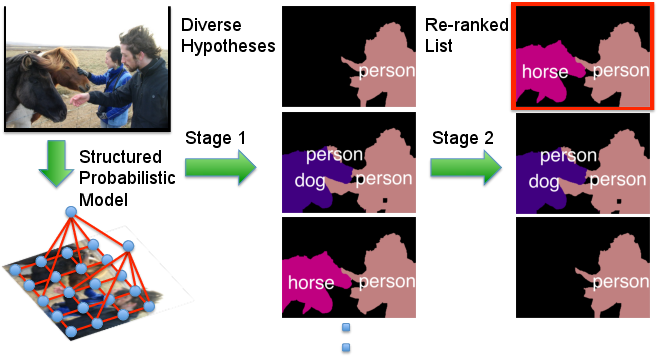
Discriminative Re-ranking of Diverse Segmentations.
Payman Yadollahpour, Dhruv Batra, Greg Shakhnarovich.
IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2013.
-
DivMCuts: Faster Training of Structural SVMs with Diverse M-Best Cutting-Planes.
Abner Guzman-Rivera, Pushmeet Kohli, Dhruv Batra.
International Conference on Artificial Intelligence and Statistics (AISTATS) 2013.
Oral Presentation -
Mode-Marginals: Expressing Uncertainty via Diverse M-Best Solutions.
Varun Ramakrishna, Dhruv Batra.
Workshop on Perturbations, Optimization, and Statistics.
Neural Information Processing Systems (NIPS) 2012.
-
Multiple Choice Learning: Learning to Produce Multiple Structured Outputs.
Abner Guzman-Rivera, Dhruv Batra, Pushmeet Kohli.
Neural Information Processing Systems (NIPS) 2012.
-
Diverse M-Best Solutions in Markov Random Fields.
Dhruv Batra, Payman Yadollahpour, Abner Guzman-Rivera, Greg Shakhnarovich.
European Conference on Computer Vision (ECCV) 2012.
[ talk slides (pptx) | talk video ]
Oral Presentation -
An Efficient Message-Passing Algorithm for the M-Best MAP Problem.
Dhruv Batra.
The Conference on Uncertainty in Artificial Intelligence (UAI) 2012.
[ talk slides (pptx) ]
Oral Presentation
Acknowledgement
This material is based upon work supported by the National Science Foundation under Grant No. 1353694.Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation or Virginia Tech.
© 2013 Dhruv Batra